therabot
my group members and I came up with a flexible and portable physical therapy aid that keeps patients motivated to complete their treatment and prevent long-term damage or immobility of motor skills.
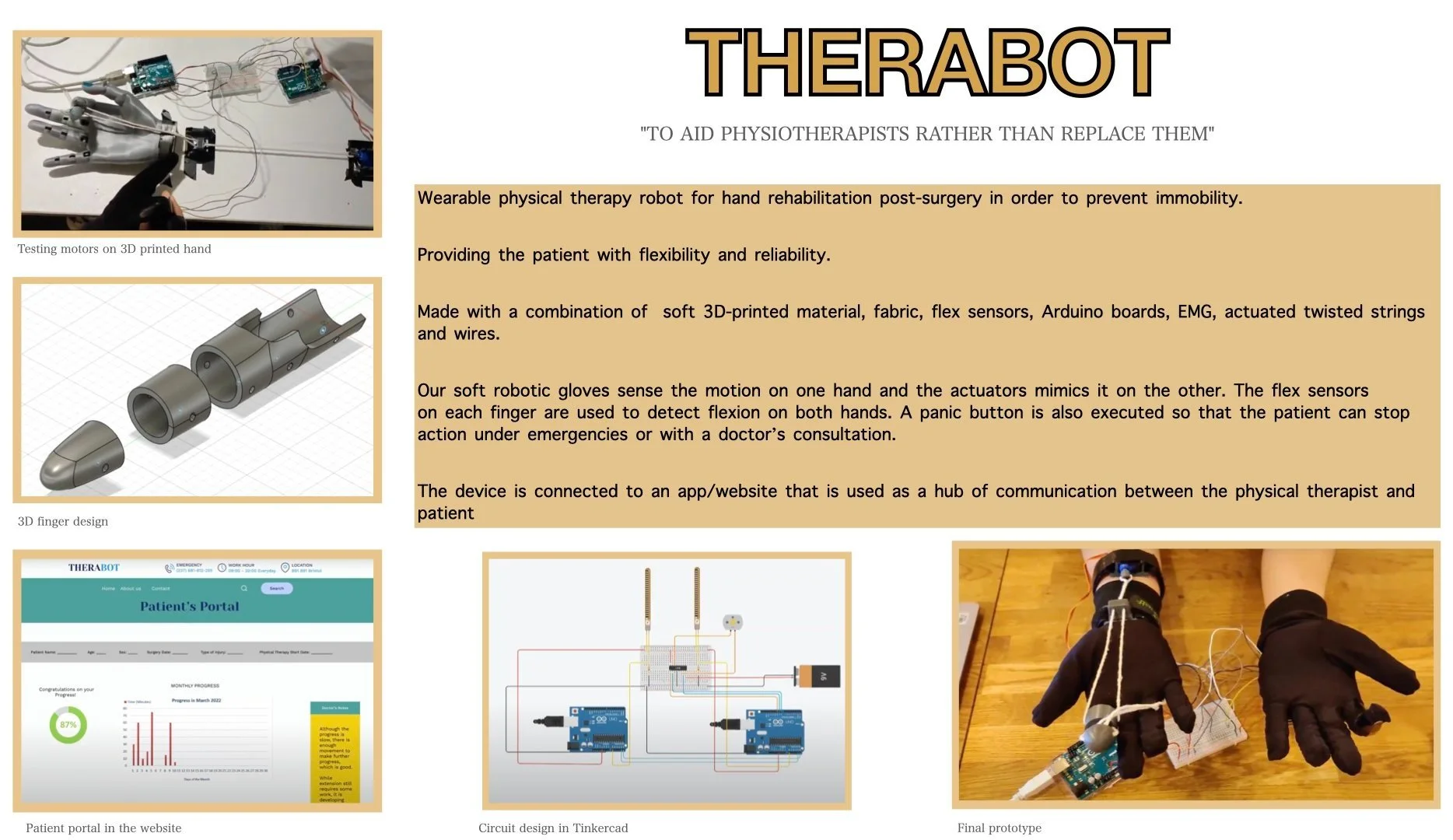
This wearable rehabilitation device offers a new approach to physical and occupational therapy. Unlike passive movement devices, it utilizes mirroring and mimicking to actively engage patients in their recovery. This helps prevent long-term motor skill damage and improve mobility. The device is currently designed for a single finger but has the potential to be adapted for the whole hand and other body parts.
Crafted with comfort in mind, the prototype uses soft, 3D-printed material and gentle fabric to avoid irritating scars post-surgery. The robotic component mimics healthy hand movements on the affected side, promoting recovery. Therapists can monitor patient progress through a connected app, which tracks data and allows patients to input completed exercises and view their improvement over time. The app also allows therapists to set exercise limits, input notes, and track patient progress. For added safety, a panic button is included on the device. Overall, this innovative device provides a promising tool to enhance physical therapy and occupational therapy treatments.
Material Enhancements:
The current prototype utilizes a soft, 3D-printed material for flexibility. Future iterations will explore even softer materials to further enhance comfort and range of motion during exercise.
Expanding Functionality:
Currently designed for a single finger, the technology has the potential to be adapted for all fingers of the hand. This would allow for a more comprehensive approach to rehabilitation.
Improved Safety and Control:
A protective bracelet will be integrated into the design to safeguard the motors from potential damage during use.Additionally, the panic button functionality will be expanded to include pre-set limits for grasp and extension, determined by the physical therapist. These limits can be implemented by adjusting the glove distance and string tension.
Streamlining Design and Functionality:
The final design will address the automatic reset function currently triggered by the flex sensors. The goal is to implement a more seamless, automated reset mechanism for improved user experience.
Onboard Processing:
The current design utilizes an Arduino board. Future iterations will explore integrating a smaller, circular Arduino board specifically designed for wearables, such as the Arduino Playground or Flora, for a more compact and comfortable fit within the glove.
Wireless Connectivity:
A Bluetooth module will be implemented to enable wireless data collection and communication between the devices and the accompanying app. This shift from a website-based system to an app will improve user accessibility and convenience.
Security and Advanced Monitoring:
Security features will be prioritized to ensure patient data protection. Additionally, EMG (electromyography) technology will be explored for potential integration to track muscle activity and provide a more comprehensive picture of patient progress.